AR中多体仿真的应用
Technische Universität达姆施塔特
计算机集成设计系“,
约翰内斯·奥尔伯特,理学硕士;Dr.-Ing教授。r . Anderl
多体仿真在增强现实中的应用
目前的技术水平允许将多体仿真(MBS)从仿真程序转移到AR。这有一些优点,例如,可以通过AR设备在现实中精确模拟CAD模型。在接下来的博客中,我将向您展示如何将CAD模型的MBS从Siemens NX转移到Microsoft HoloLens的AR。开云体育平台登录因此,NX的MBS定义被接管,并提供给HoloLens。
基础知识:将简单的CAD模型转换为AR
从MBS转移到AR的基础首先是简单的CAD模型可以转移到HoloLens的AR。在早期的研究工作中,这是关于最合适的程序和工具的调查。在不涉及太多细节的情况下,我们已经开发了一个流程链,将CAD模型转换为HoloLens的AR。流程链从CAD程序(如Siemens NX)开始,然后通过DCC程序(如3ds Max)转移到游戏引擎。开云体育平台登录当使用Game Engine时,可以直接为HoloLens编译应用程序。作为一个游戏引擎,Unity已经被证明是最合适的。使用这个流程链,CAD模型现在可以直接作为应用程序传输到HoloLens上。在这方面有趣的是所谓的JT开放插件,它允许将JT文件导入Unity。这样就可以在HoloLens中显示jt文件。
在当前的研究工作中,我们正在处理广泛的过程链,其中CAD模型包含MBS或进一步的信息。作为一个例子,我们现在将看看一个工厂规划场景,其中使用HoloLens在现实中模拟机器人的运动非常重要。
从CAD到MBS再到AR的流程链
导入纯CAD模型和导入定义了MBS的CAD模型之间的区别是所谓的运动学模块,必须在此上下文中创建。运动学模块创建一个接口,将信息传输到AR中。数据的信息流可以用活动图表显示,如下所示:
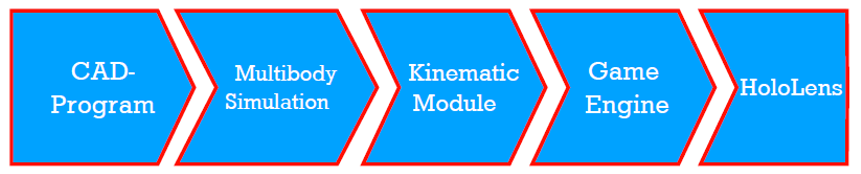
这里我们进行类似于上面的基本方法,但我们没有DCC程序,而是将多体仿真与运动学模块一起插入。
我们在西门子NX中构建了一个由6个独立组件和一个夹持器组成的机械臂。开云体育平台登录然后为多体仿真定义运动体、关节和驱动器。这样就可以进行必要的模拟计算。在任何情况下,都应该对结果进行评估,以避免令人不快的意外。

现在我们开始讲运动学模块。的运动学模块本质上有三个部分读者,转换器和工厂.的读者读取XML文件并给出一个关节列表作为输出。的转换器然后将游戏对象的向量转移到一个坐标系统中,从而工厂创建关节并定义属性。只需要读入和调整多体模拟的数据。的运动学模块然后自动创建所有必要的运动学元素。
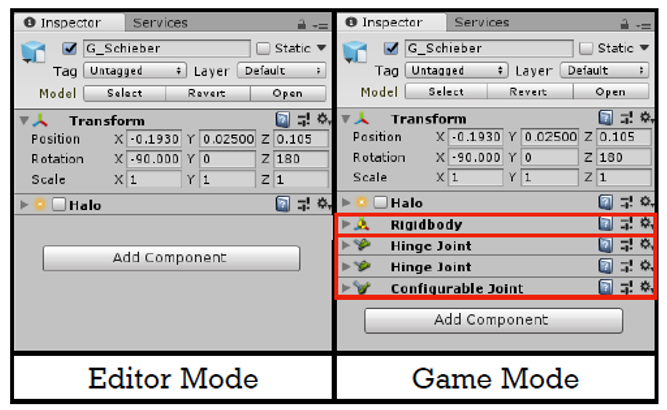
创建的数据现在可以导出并插入到Unity中。在测试运行期间,您可以在游戏模式中看到创建的关节。机器人手臂可以控制,多体系统的新位置可以很容易地设置。
然而,由于游戏引擎环境的自由度和受限功能,这个过程非常耗时。此外,如果达到了强烈的自由度限制,由于关节彼此隔离,这通常会导致多体系统的不现实行为。
现在你可以在Unity中使用MBS进行进一步的项目。由于我们正在追求将MBS转移到HoloLens的目标,因此将设置一些HoloLens的特定设置,并使用通用Windows平台将MBS转移到HoloLens。最终结果可以在下面的视频中看到:
